Erstmals wurde ein Roboter gebaut, der seine Form selbständig an seine Aufgabe und Umwelt anpasst.

SMORES Module formen Roboter
[Foto: Tarik Tosun]
Der autonome Roboter, der von Wissenschaftlern der Cornell und Pennsylvania University entwickelt wurde, besteht aus mehreren Modulen – sogenannten „SMORES Modules“. Der Roboter erhält zwar eine Zielvorgabe, aber über die Art und Weise, wie er das Ziel erreicht, entscheidet er selbständig.
Durch seine modulare Bauweise kann er seine Form ändern und sich so an die Umgebung anpassen, in der er seine Aufgabe erledigen muss.
Module machen Roboter anpassungsfähig
Der modulare Roboter besteht aus würfelförmigen Modulen, die mit Hilfe von Rädern fahren können. Die Module können sich voneinander lösen und wieder miteinander verbinden. Der Zusammenhalt wird durch Magnete sichergestellt. Die Kommunikation mit der Steuerungszentrale erfolgt über WLAN. Ursprünglich wurden diese sogenannten SMORES Module an der University of Pennsylvania entwickelt.
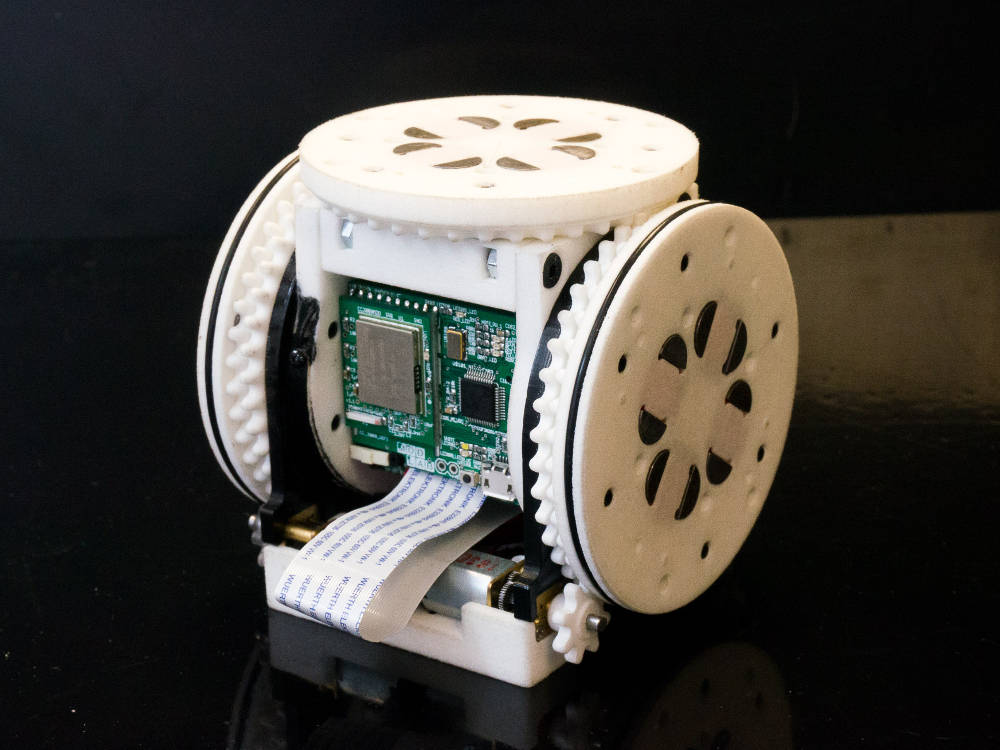
SMORES Modul der University of Pennsylvania
[Foto: Tarik Tosun]
Neben den austauschbaren Modulen gibt es noch ein Sensormodul, das die Basis des Roboters bildet. Dieses Sensormodul ist mit mehreren Kameras und einem kleinen Computer zur Erfassung und Verarbeitung von Daten über die Umgebung ausgestattet.

Roboter passt sich den zu bewältigenden Hindernisse an
[Foto: Tarik Tosun]
Die Software des Roboters steuert die Aktionen und Rekonfigurationen. Mit Wahrnehmungs-Algorithmen wird die Umgebung analysiert.
Autonome Steuerung
Der Roboter kann aus 57 verschiedenen Konfigurationen auswählen, die in einer Bibliothek hinterlegt sind. Darunter findet sich eine Rüsselformation (Proboscis), bei dem die Module eine Art langen Arm nach vorne ausbilden, eine Skorpion-Formation, bei dem die Module in senkrechten Linien angeordnet sind und eine horizontale Reihe an der Front bilden sowie eine Schlangen-Formation, bei der die Module in einer einzigen Linie angeordnet werden.
Außerdem kann der Roboter zwischen 97 Verhaltensweisen wählen, wie aufpicken, fahren, fallen lassen oder aufbäumen. Ein Youtube-Video zeigt den Roboter, wie er bestimmte Aufgaben erfüllt.
Sobald der Roboter mit einer neuen Aufgabe betraut ist und die Umgebung erfasst hat, sucht seine Software nach den Formen und Verhaltensweisen, mit denen sich die Aufgabe am besten lösen lässt.
Der Roboter sei der Erste, der ein völlig autonomes Verhalten und Rekonfigurationen auf der Grundlage einer Aufgabe und einer unbekannten Umgebung zeige, sagt einer der an dem Experiment beteiligten Forscher, Hadas Kress-Gazit. Die Ergebnisse des Experimentes wurden in der Zeitschrift Science Robotics veröffentlicht.
Für Katastrophen-Fälle geeignet
Da modulare Roboter aus mehreren austauschbaren Teilen bestehen, kann ein defektes Modul ohne Probleme ausgetauscht werden. Ein weiterer Vorzug des neuen Roboters ist seine Flexibilität. So könne er sehr gut für Arbeiten eingesetzt werden, die ein Manövrieren in einem ungleichmäßigen Gelände erfordern wie etwa beim Aufräumen nach einem Erdbeben oder einer Naturkatastrophe, sagt Kress-Gazit.