Der Roboter namens RSTAR kann kriechen, krabbeln, Wände hochfahren und noch dazu im Schildkröten-Gang Hindernisse überwinden.
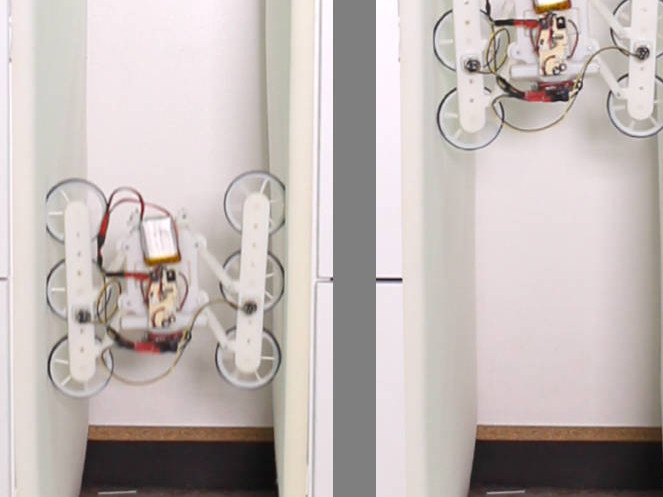
Der Roboter RSTAR fährt Wände hoch
[Foto: Ben-Gurion-Universität des Negev]
Forscher von der Ben-Gurion-Universität des Negev haben mit dem RSTAR einen Such- und Rettungsroboter entwickelt, der sich durch seine Wendigkeit und Anpassungsfähigkeit an schwieriges Gelände auszeichnet.
RSTAR ist schnell und sparsam
Das Roboter-Multitalent verbraucht wenig Energie. Trotzdem ist der Rising STAR schnell; er kann circa einen Meter pro Sekunde zurücklegen.
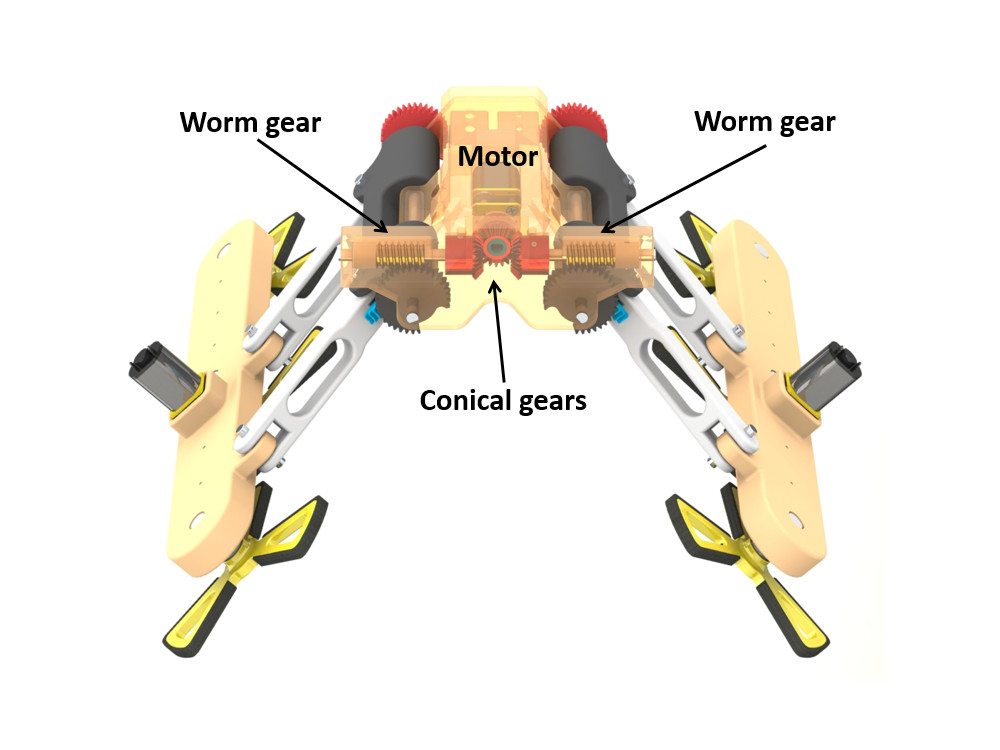
Das Innenleben des Roboters RSTAR
[Grafik: Ben-Gurion-Universität des Negev]
„Der RSTAR ist ideal für Such- und Rettungseinsätze in unstrukturierten Umgebungen, wie z.B. eingestürzten Gebäuden oder Überschwemmungs-Gebieten, wo er sich anpassen und eine Vielzahl von aufeinander folgenden Hindernissen überwinden muss, um sein Ziel zu erreichen“, sagt Assistenz-Professor Dr. David Zarrouk von der Ben-Gurion-Universität des Negev (BGU) und Leiter des Labors für Bioinspirierte und medizinische Robotik. Zarrouk hat den RSTAR gemeinsam mit Robotik-Laborant Liran Yehezkel entwickelt.

Roboter Rising STAR auf Geröll und schwierigem Gelände
[Foto: Ben-Gurion-Universität des Negev]
Das erste STAR-Modell hatte Zarrouk und Kollegen am Biomimetic Millisystems Lab der Universität von Californien (Berkeley) bereits im Jahr 2013 vorgestellt. Diese frühe Version verfügte bereits über die Speichenräder in Dreiecks-Form und konnte auch schon den Winkel seiner Radbeine abflachen, um unter niedrigen Hindernissen hindurchzuschlüpfen.
Rising STAR kann den Schildkröten-Gang
Der neue STAR kann jetzt auch die Position seines Körpers im Verhältnis zu seinen Beinen verändern. Durch die damit verbundene Schwerpunkt-Verlagerung ist das Überwinden von Hindernissen, wie etwa größeren Baumwurzeln, möglich. Bewegt sich der Roboter unter Einsatz der Körper-Verlagerung fort, erinnert das an den Gang einer Schildkröte.
Außerdem kann sich der RSTAR auf den Rücken drehen und durch die Möglichkeit, seine Beine in beide Richtungen abzuwinkeln, auch auf dem Rücken weiterfahren beziehungsweise krabbeln. In einem Video auf Youtube kann man sich den Roboter in Aktion anschauen.

Roboter Rising STAR aus der Nähe betrachtet
[Foto: Ben-Gurion-Universität des Negev]
Nächster STAR soll noch größer werden
Die Forscher von der BGU arbeiten bereits an einer größeren STAR-Roboter-Version. Diese soll über größere Hindernisse, einschließlich Treppen, klettern können und fast zwei Kilogramm Sensoren sowie Zubehör umhertragen. Außerdem soll ein kleinerer STAR oder RSTAR huckepack auf dem größeren Roboter transportiert werden.